发布日期:2021-03-08本条信息已被查看了108次
潘彬彬团队参与的研究成果登上《自然》封面
2021年3月4日,国际顶级期刊《自然》(英文刊名nature)封面发表了上海海洋大学深渊科学与技术研究中心潘彬彬团队与浙江大学等单位合作的仿生深海软体机器人最新研究:马里亚纳海沟的自驱动软体机器人(Self-powered soft robot in the Mariana Trench),该研究成果率先实现了软体机器人的万米深海操控以及深海自主游动实验。
在研究期间,上海海洋大学深渊科学与技术研究中心潘彬彬团队与浙江大学李铁风团队合作开展了软体机器人从实验室常压环境到11000米深海环境的高压、高盐、低温的试验与改进,在上海海洋大学深渊科学与技术研究中心通过数十次压力试验完成了软体机器人的耐压性能改进。潘彬彬团队还在此基础上为柔性机器人研发了基于万米着陆器的专用海试设备——深海穿梭平台,并于2018、2019年两个航次,数次搭载柔性机器人到达马里亚纳海沟挑战者深渊开展了海试,为软体机器人的最终成功发挥了重要作用。
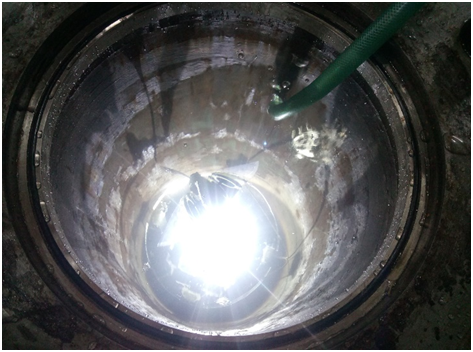
柔性机器人装入压力筒内试验
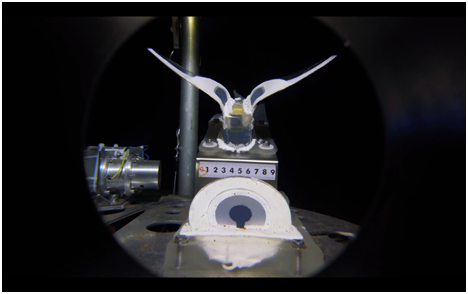
穿梭平台拍摄柔性机器人在海底10920米试验的影像
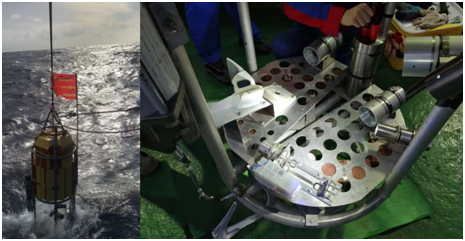
穿梭平台样机搭载柔性机器人进行全海深布
潘彬彬副研究员长期从事深海装备的研发,先后参加了“蛟龙”号和“深海勇士”号载人潜水器的研制。从2013年深渊科学与技术研究中心成立至今潘彬彬团队完成了两代5台万米着陆器、万米级穿梭平台、4500剖面浮标、全海深采水器、全海深主动生物诱捕器、全海深沉积物取样器、全海深新材料执行器、6000米恒速注射器、万米高清摄像机、两型通信标样机等深海设备/装备的研发。承担了多个航次的万米着陆器试验与采样作业任务,有效支撑了深渊科学的发展。团队已在国内外杂志发表二十余篇论文,申请十余项专利、出版专著3本。
全文链接:
https://www.nature.com/articles/s41586-020-03153-z